

在工业机器人的使用中,一定程度上可以认为机器人自动执行的路径和程序是人为提前设计和规划好的既定路线,即,不停的重复人为示教的路径。
想要实现示教需要的路径上的点,必须掌握工业机器人的手动操作方能实现(机器人手摇不到的点,亦不能自动到达);
在OTC机器人的手动操作时,需要满足以下条件:
1.钥匙开关在示教;
2.示教器旋钮在示教;
3.按R,无报警;
4.同时按,动作可能+I(或按钮运转准备),示教器显示运转准备;
5.使能按键被正确按下;
6.不松开使能按键的情况下,按住方向键进行移动;
(*注:机器人移动速度由示教器显示速度5个档位决定,线性速度250mm/s)
OTC机器人手动操作的要素是坐标系,由示教器右上角速度百分比决定速度。
下图是机器人打开后的画面,蓝色框选位置,显示所选机构,当前坐标系,手动速度;
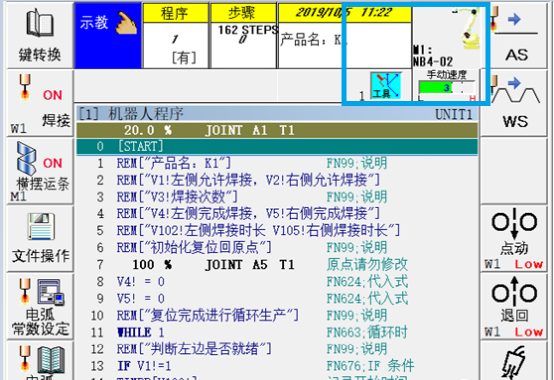
可以使用下图框选按键对手动操作条件进行变更:
1.手动速度:可以调节5个档位,对应不同的速度;
2.坐标系变更:切换轴(六个轴单独运动)、机器人(以机器人底座大地坐标系为基准运动)、工具(当前使用工具坐标系)三种坐标系;
3.轴操作键:XYZRxRyRz分别对应坐标系的方向以及六个关节轴;

了解更多OTC机器人
文章来源网络,如有侵权请联系删除